
One of the I-MECH building blocks (named as BB9) is about iterative and repetitive control. Do you have a system that exhibits periodic errors in time/position domain? Then BB9 within the I-MECH Center, can be of service! To learn about the principles of repetitive control, the High-Tech Institute brings this training. The course explains developments in control, from classical feedback and feedforward control towards advanced control techniques. These developments include repetitive control, which applies to industrial systems that are subject to repetitive disturbances. Typical examples of repetitive disturbances include periodic motion tasks and non-uniform torque profiles from unbalanced rotating axes. The key idea is that repetitive control can completely compensate for these disturbances by learning from measured data, typically leading to an order of magnitude reduction of servo errors.
The course covers an in-depth treatment of repetitive control, and ranges from:
- theory, e.g., understanding the convergence of repetitive control from classical feedback theory;
- to design: learning how to design repetitive controllers using typical motion control design approaches (loop-shaping);
- and algorithms: full coverage of tailor-made Matlab-algorithms (with possibility to take these home).
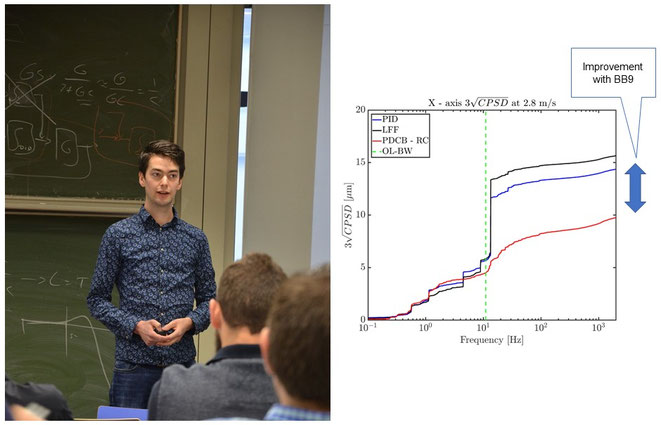
In the context of this course, Sioux CCM employee Lennart Blanken, as a guest lecturer, has recently presented an evidence that the theory can bring convincing results. He explained how the work of Noud Mooren (TU/e), Ibrahim Acan (Sioux CCM) and Joep Kooijman within the I-MECH Project brought significant improvements in I-MECH Pilot 1.